Конструирование прототипа робота Wall-e с использованием конструктора для творчества Merkur.
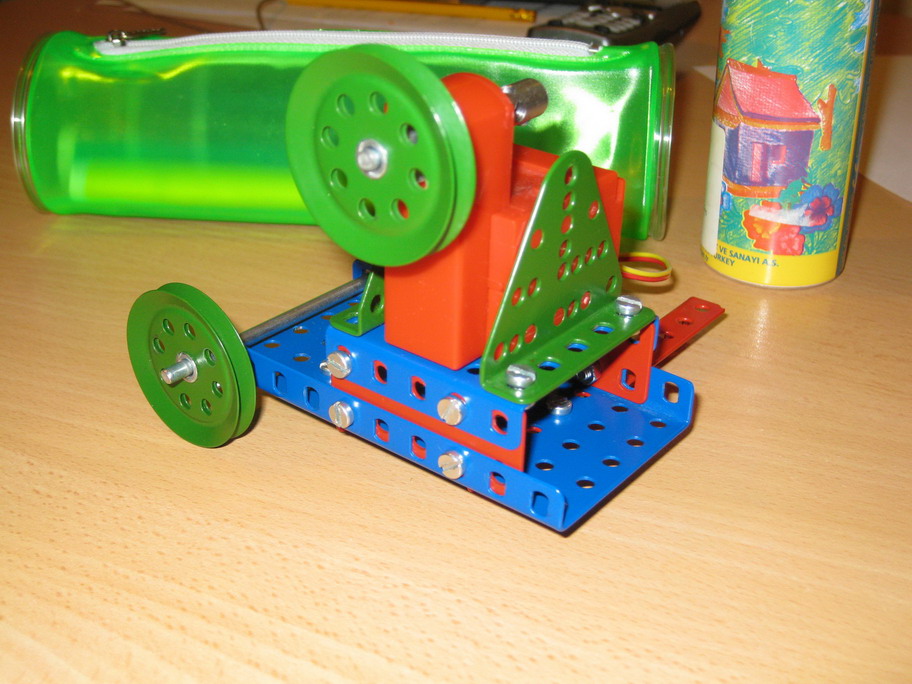
Конструирование прототипа робота Wall-e с использованием конструктора для творчества Merkur. Студия Pixar создала в мультфильме Wall-e обоятельный образ робота убощика, оставленного на Земле убирать планету, долгие годы одиночества и изучения вещей которых он находил на свалке, позволило ему эволюционировать от простого робота, до эмоционального героя способного на чувства и решительные действия.Миллионы детей и взрослых посмотрели этот замечательный мультфильм, некоторые атрибуты из этого фильма стали появляться в реальной жизни. Многие люди кто смотрел фильм, как только в магазинах появились готовые модели разного уровня сложности и интелекта, уже преобрели себе или детям эти игрушки, а некоторые, вспомнив замечательную программу ЭВМ (Это Вы Можете) решили сделать сами. Выбор общедоступного конструткора Меркур снизило немного требование к образу РОБОТяги, но с другой стороны, дало возможность показать, как ЖЕЛАНИЕ, можно МАТЕРИАЛИЗОВАТЬ своими руками. Предполагалось построить робота из большого набора конструктора Merkur 8. Это самый большой набор и предполагалось, что всего хватит. На первом этапе была подобрана геометрия шасси с учетом имеющихся в наборе колес и гусениц. Внизу фото самого устойчивого варианта.
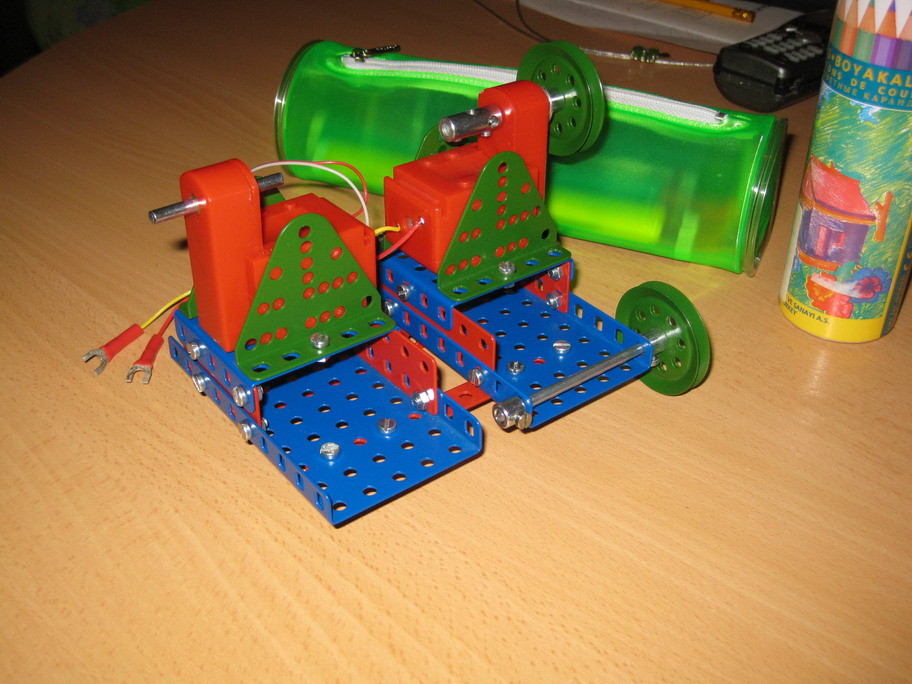
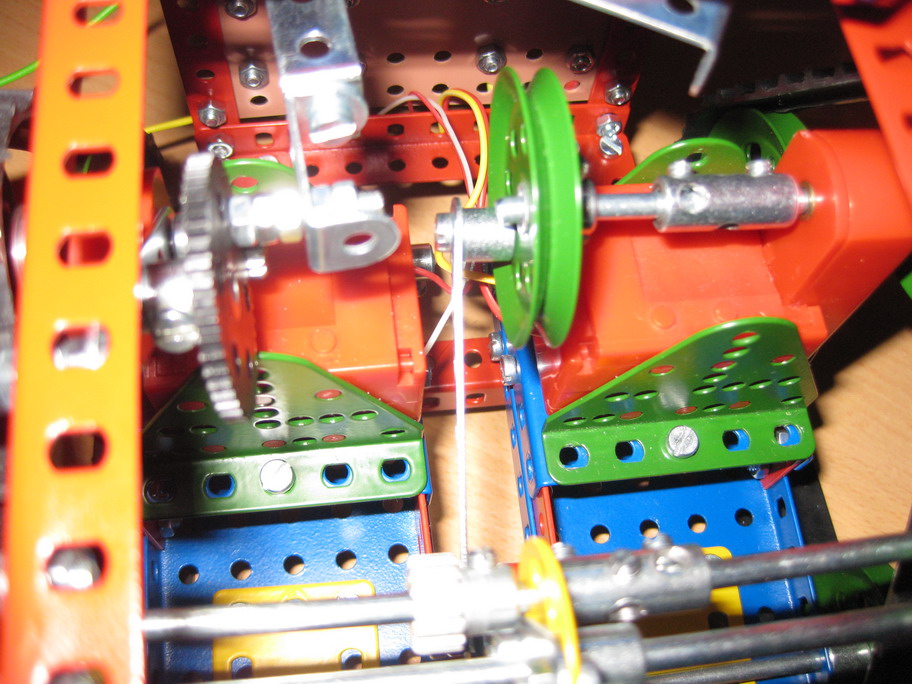
Всего было создано 3 варианта, наиболее похожий и позволяющий разместить внутри корпуса электродвигатель с редуктором оказалась схема показанная на фотографии вверху. Шасси при испытаниях бодро бороздило пол, диваны и столы, но упорно не хотела поворачивать :) По непонятным для меня причинам в самом большом наборе всего ОДИН ??? двигатель, на такое большое кол-во деталей в наборе, поэтому было докуплен набор Merkur 2.2 с расширенным набором шестеренок и еще ОДНИМ!!! электродвигателем.
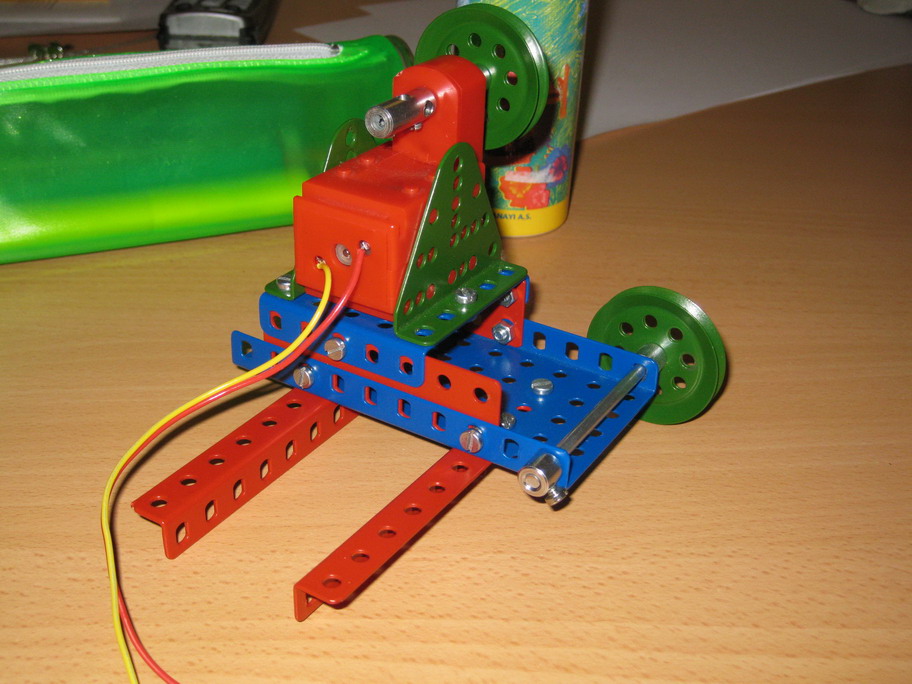
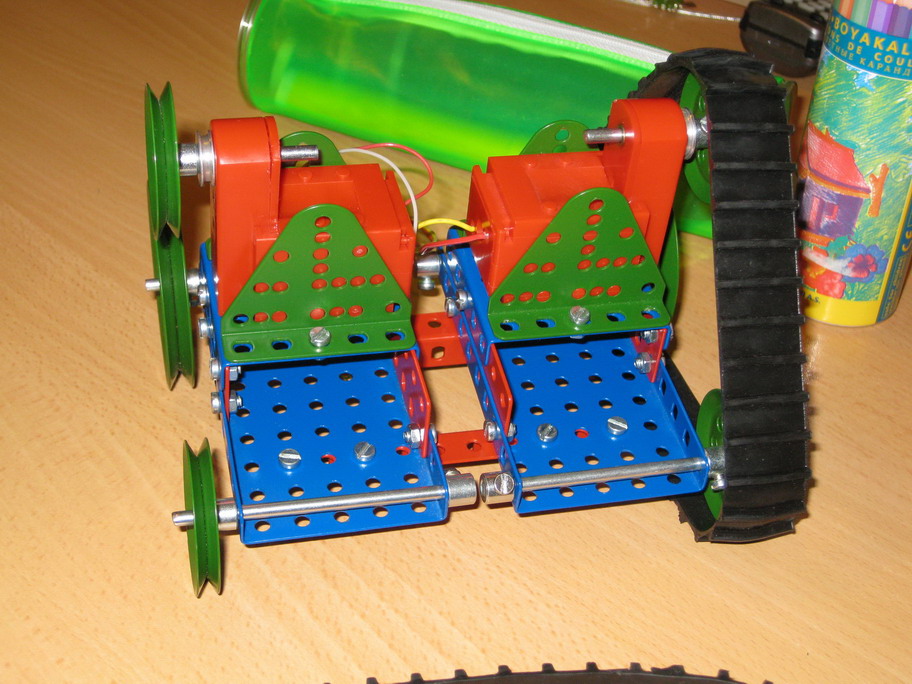
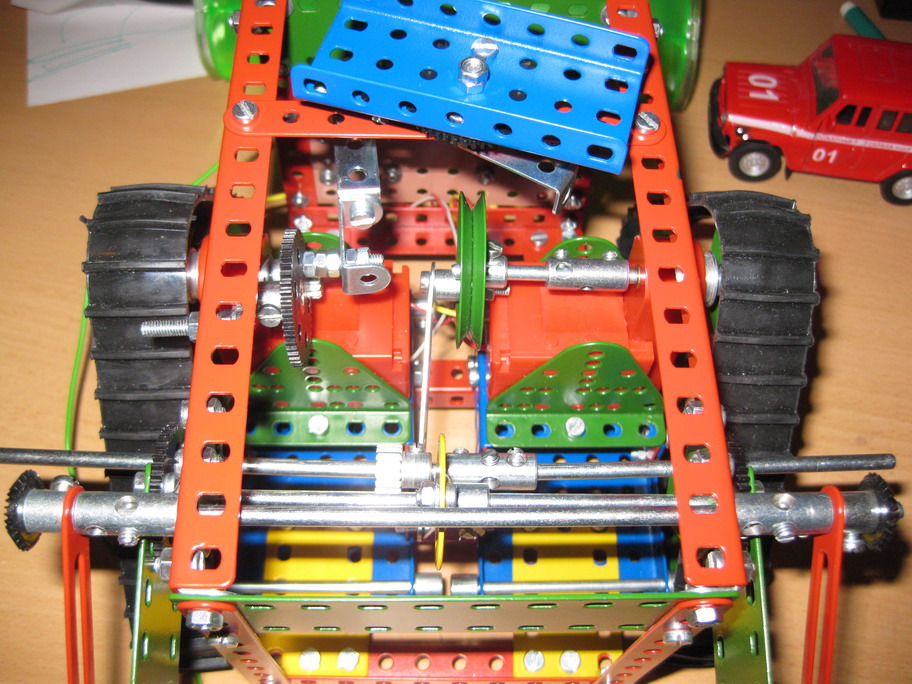
Одно объяснение этому есть - так как фирма Merkur много выпускала модели поездов которые ездят по рельсам, а там сами знаете, как в колее, то это наложило отпечаток и на обычные наборы. Кстати письмо в Merkur с предложениями отправил. Дальше работа по созданию шасси пошла проще, для начал избавились от ременной передачи, которая на прототипе вращала сразу обе гусеницы, сконструировали два элемента шасси зеркальные по компоновке. Потом элементы шасси соединяются на двух уголках.
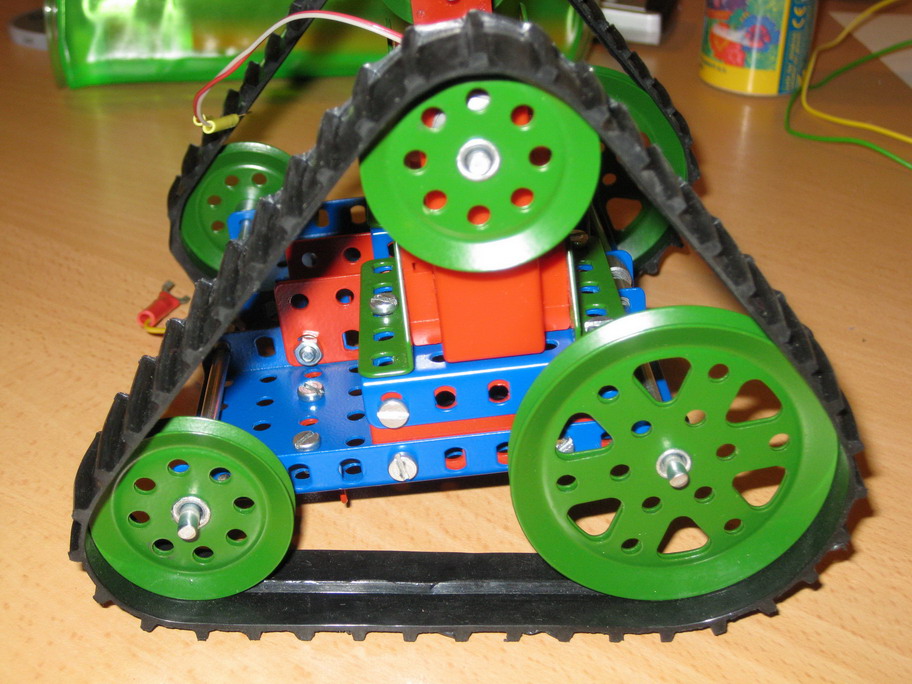
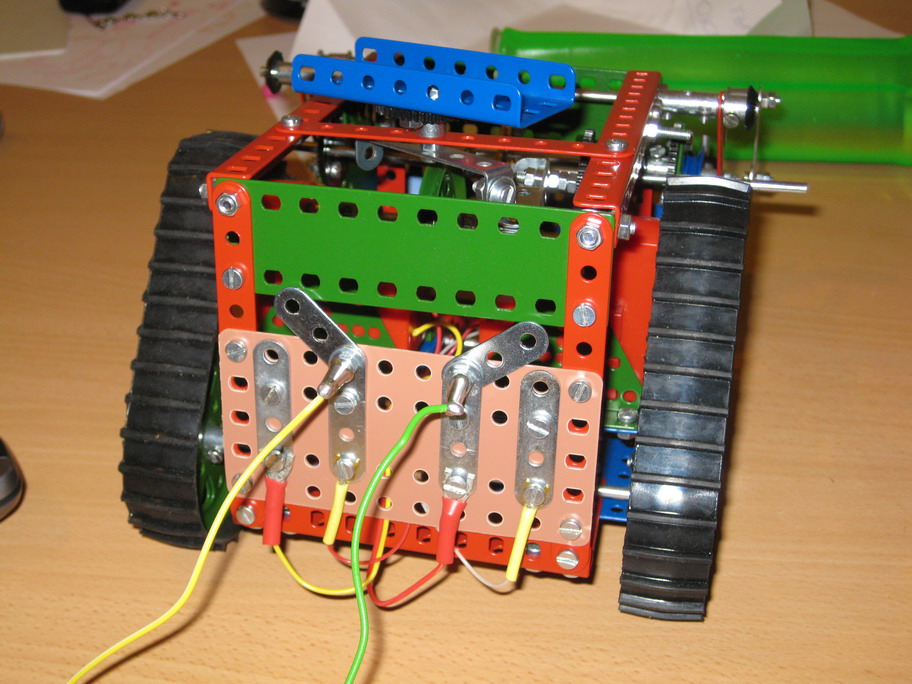
Обратите ВНИМАНИЕ при закрепление колес на валах редукторов, штатные редукторы имеют ДВЕ передачи, переключение происходит путем осевого перемещения выходного вала редуктора. В данном примере, для того чтобы все ТРИ колеса каждого борта стояли на одной линии вдоль каждой стороны, необходим подложить шайбы (втулки) под ведущие катки одетые на редукторы. В текущем примере использованы блоки из набора Merkur 8. Если этого не сделать, то гусеницы могут соскакивать.
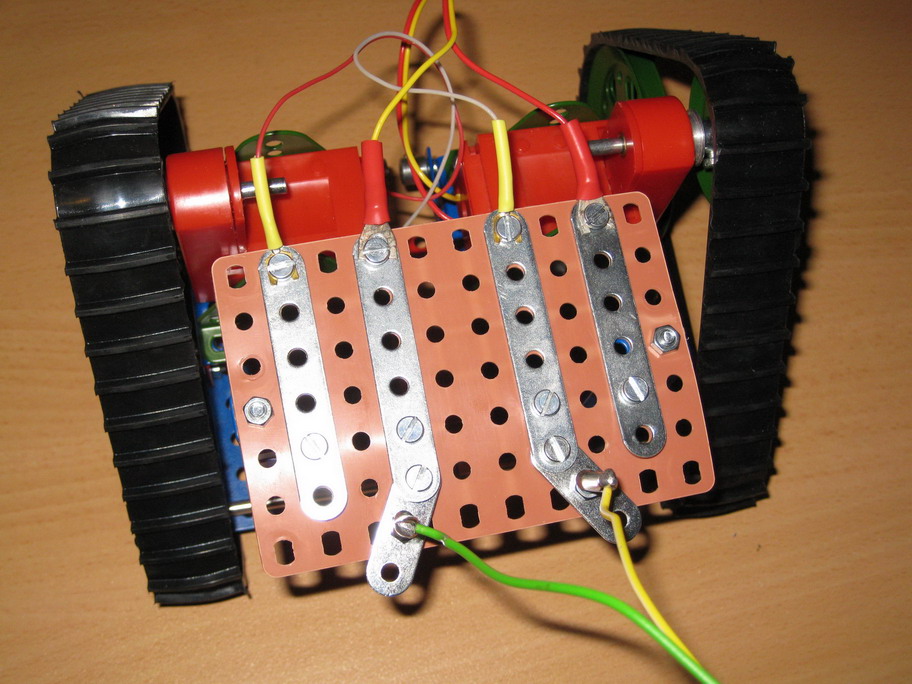
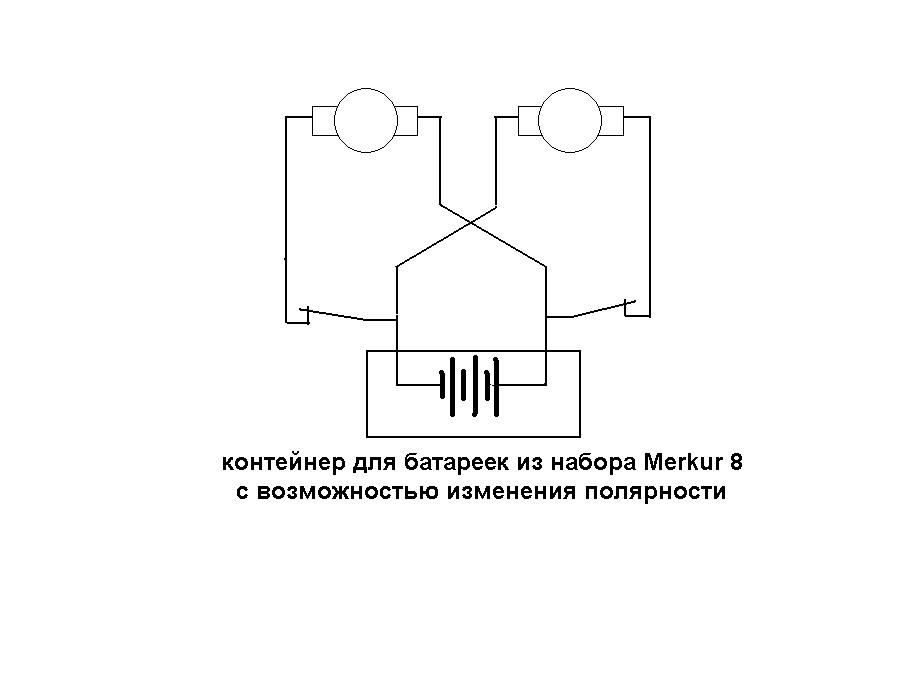
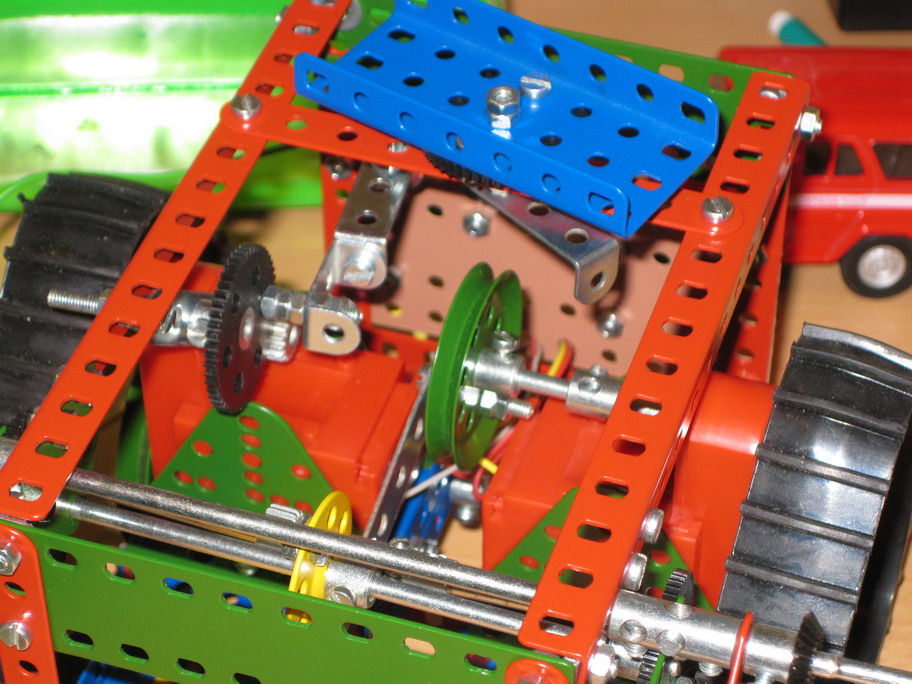
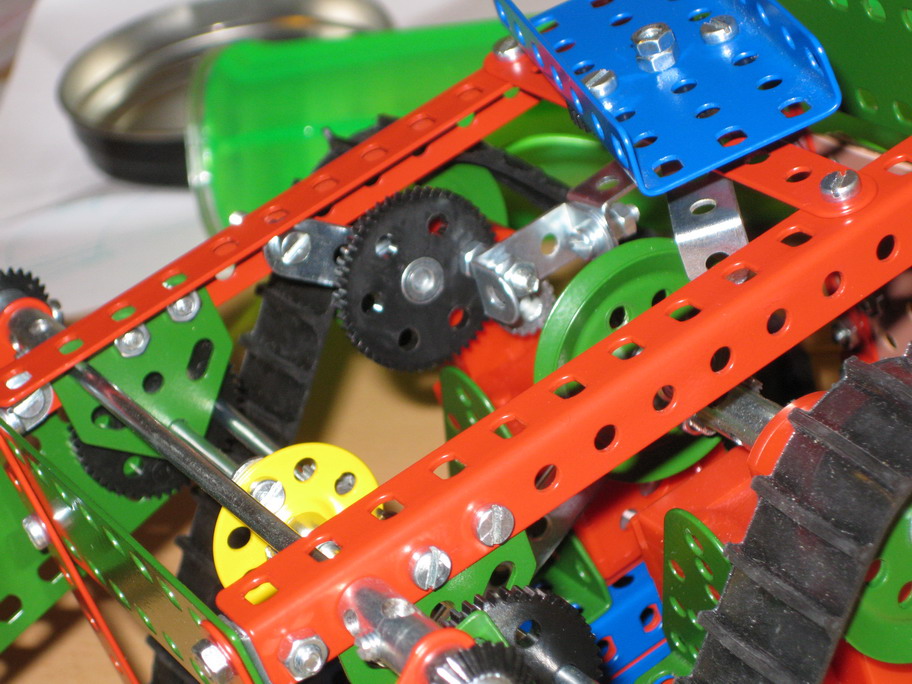
После того как надели гусеницы, мы получили готовое шасси будующего робота уборщика Валли. Внизу на основании шасси, рядом с редукторами осталось достаточно места для размещения тяжелых батареек. После первых испытаний, на пластиковом основании была собрана временная панель управления, позволяющая переключать направление движения робота. Эта панель установлена на двух П-образных стоийках.
Теперь переходим к ходовым испытаниям для выяснения насколько правильно удалось сконструировать конструкцию. Ниже показано видео испытаний шасси прототипа робота Wall-e. А на этих видео показан результат следующего конструирования манипуляторов и основания головы робота
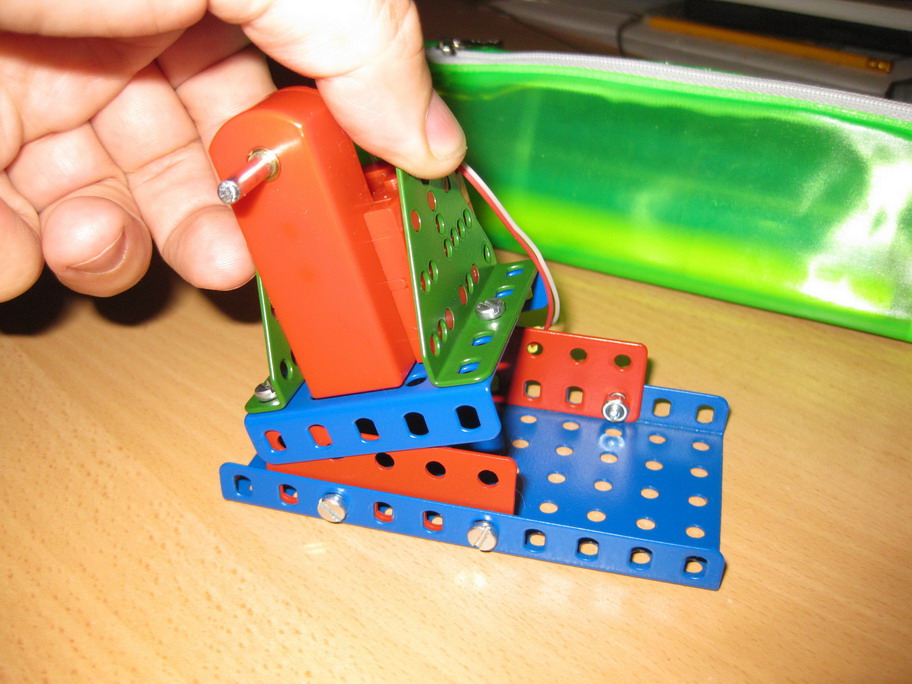
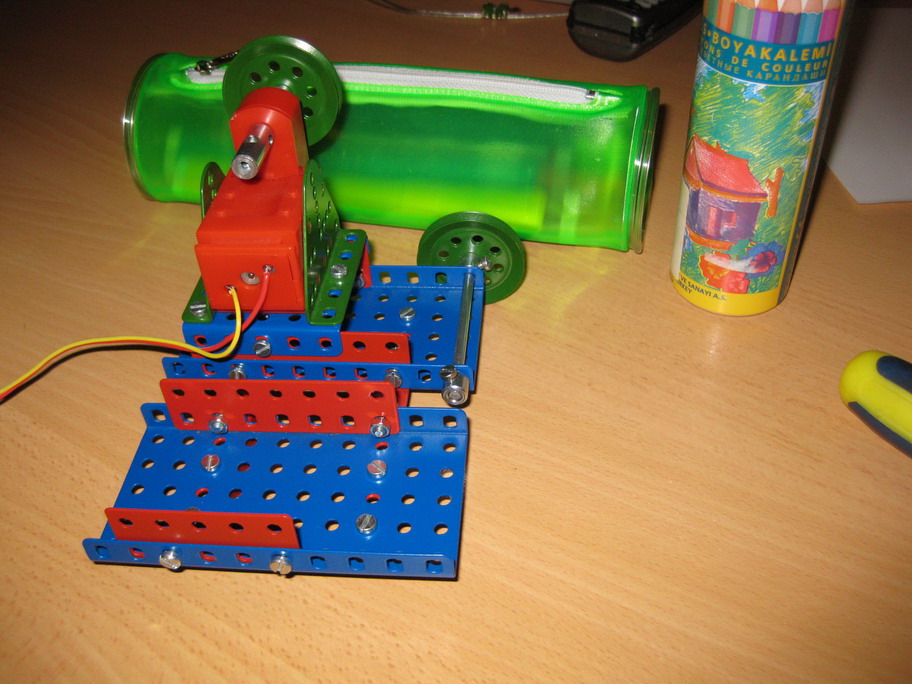
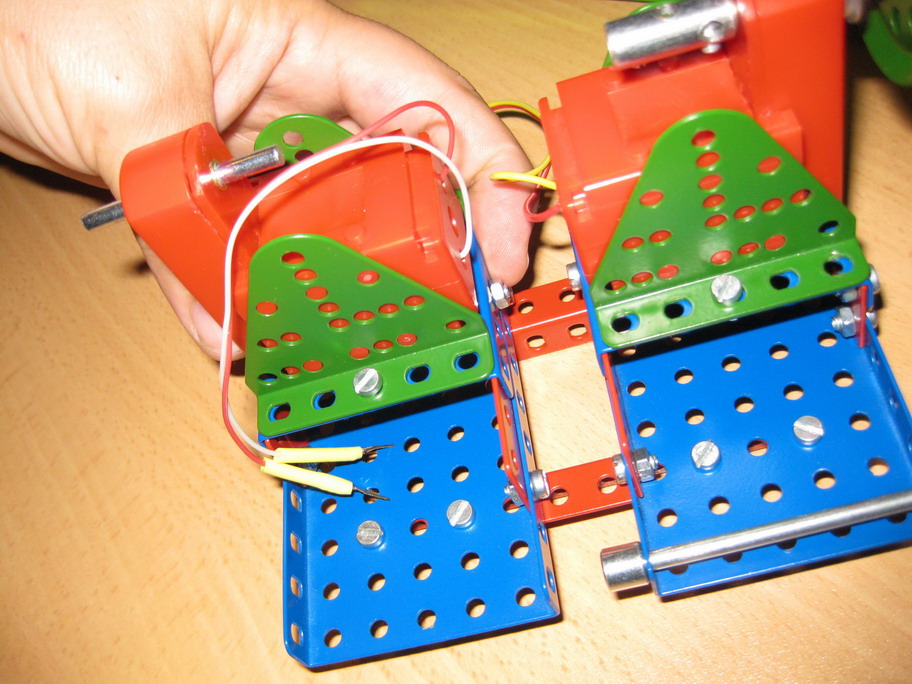
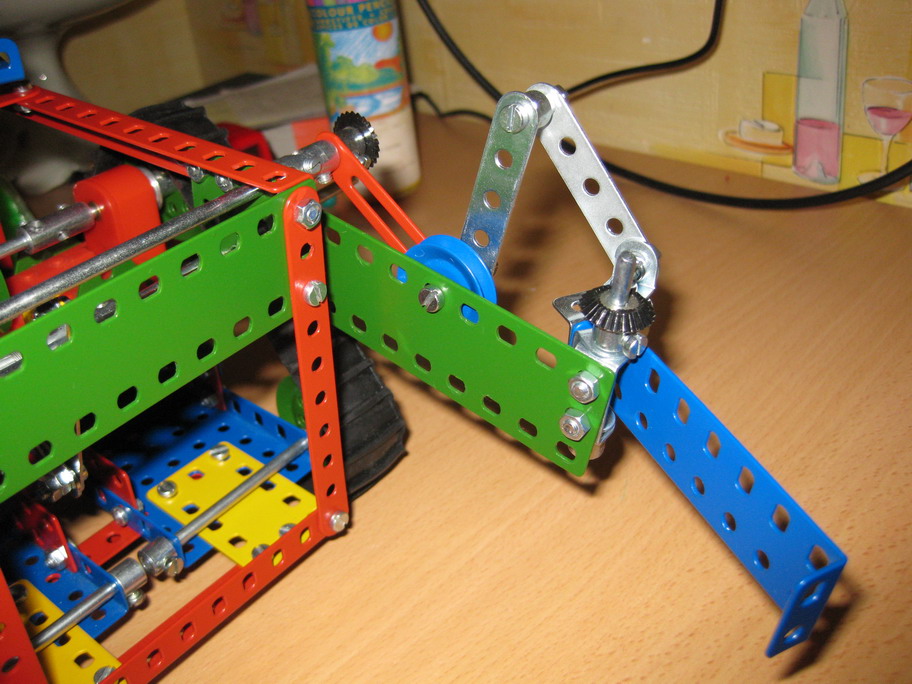
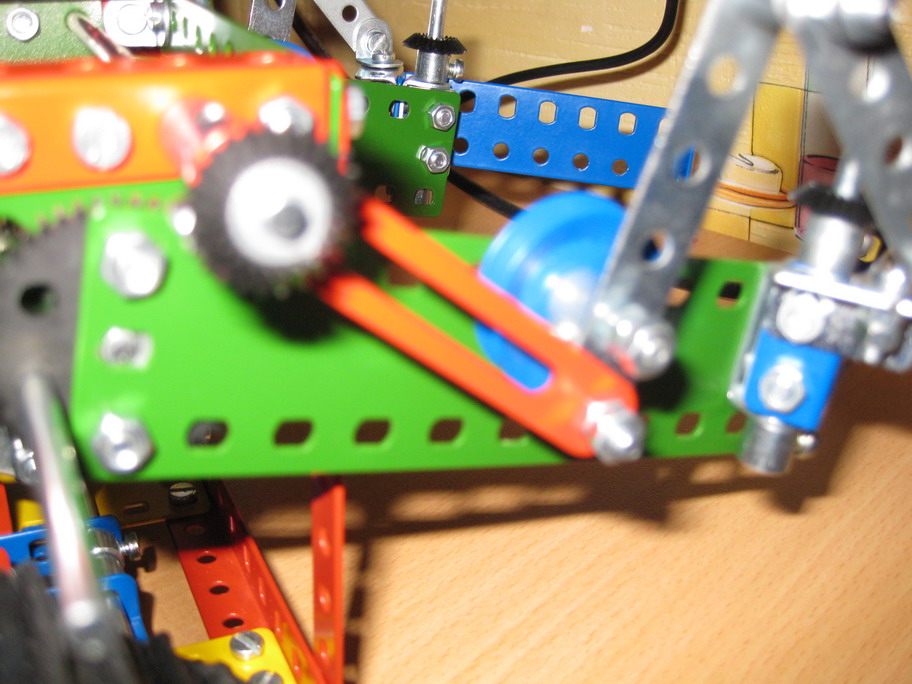
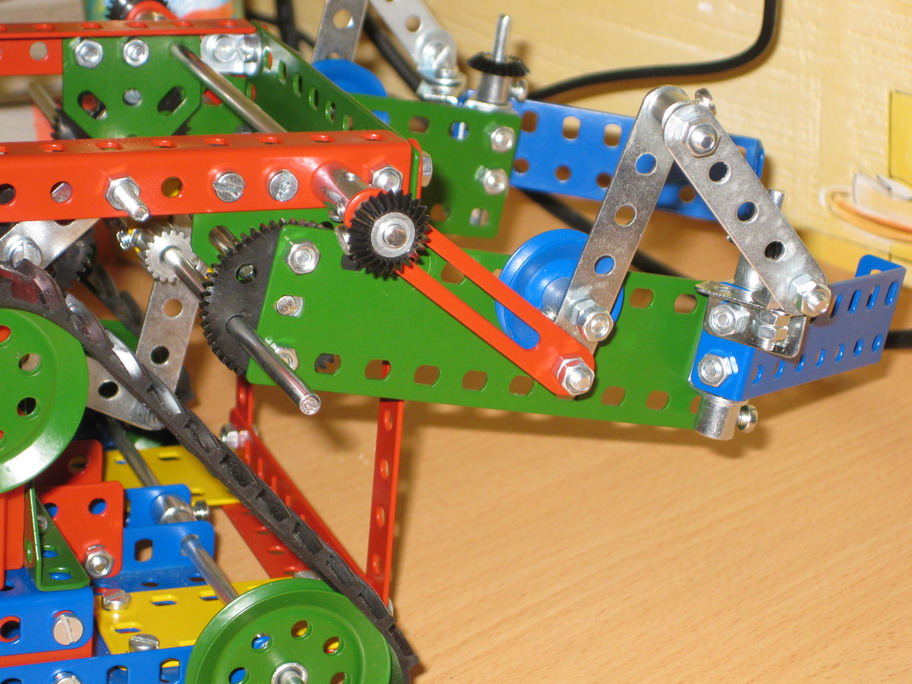
После проведений испытаний переходим к созданию каркаса корпуса и привода манипулятров. Пространственную конструкцию рамы Корпуса собрали из уголоков и полосок, немного вынеся его за пределы шасси на дополнительных пластинах. Так как мотора у нас всего ДВА, то один мотор будет отвечать за движение манипуляторов, а другой за вращение головы робота. Для преобразование вращательного движения в возвратно-поступательное манипуляторам, используется шатун, закрепленый на маховике приводимый во вращение одним из редукторов.
Далeе, передав вращение на вал, где должны крепиться манипуляторы, сконструировали и реализовали систему рычагов для привода захвтов манипуляторов. Эти захваты ИМИТИРУЮТ движение робота по сгребанию мусора.
Собрав манипулятор с захватами и убедившись в их работе, перешли к моделированию зубчатой передачи, которая через шатун поворачивает основание головы робота в разные стороны в момент движения. Сама передача состоит из двух шестрней, одна из которых закреплена на оси редуктора, а вторая на перемычки между редуктором и верхней планкой каркаса. Большая шестерня приводит в движение рычаг который поворачивает основание головы.
В следующей серии: установка "видеокамер", закрепление внешних панелей, и создание удобного пульта управления.PS Всем кто попросил выслать дополнительные фотографии узлов, но не получил их, проверьте пожалуйста, чтобы ваши ящики принимали файлы больше 1Мб.Продолжение следует.....